
OS - Lab 7: File System and Shell
Operating Systems (H) @ Fudan University, fall 2020.
实验简介
实验报告
1 文件系统
user/src/mkfs。你需要添加测试证明你实现的文件系统可以读取到你打包的文件,在数量、内容上是正确的。1.0 总览
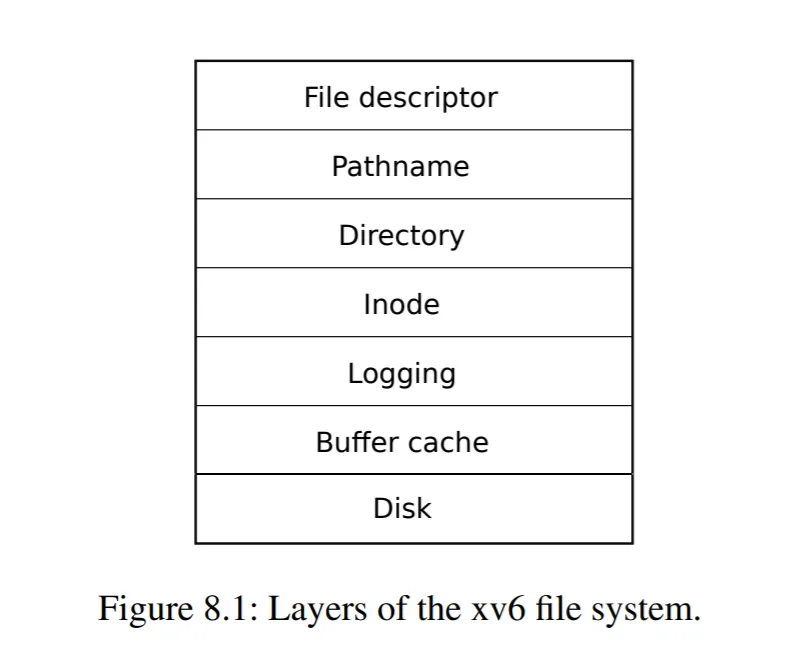
文件系统的整体架构参考 xv6 的设计,其 7 层架构如图所示。以下我们将自底向上依次进行阐述。
1.1 Disk
第 1 层是磁盘驱动,作为物理磁盘的抽象层,为操作系统提供了读写磁盘块的方法。我们已在 Lab 6 时在 kern/sd.c 中实现,详见 Lab 6 第 2 节。
在这一层中,我们提供了以下方法:
sd_init:初始化 SD 卡并解析主引导记录sd_intr:处理 SD 卡设备中断sd_rw:读写 SD 卡磁盘块
1.2 Buffer cache
第 2 层是磁盘块缓存,用于将磁盘块缓存到内存中,从而加速磁盘读写。我们已在 Lab 6 时在 kern/bio.c 中实现,详见 Lab 6 第 1 节。
在这一层中,我们提供了以下方法:
binit:初始化buf队列bcachebread:从磁盘读取buf到内存bwrite:将buf从内存写入磁盘brelse:释放一个不在使用中的bufbpin:将buf的引用数加1,其中引用数表示当前正在等待此buf的设备数量bunpin:将buf的引用数减1
1.3 Logging
第 3 层是磁盘改动日志,用于维护文件系统的崩溃一致性(crash consistency),确保写磁盘的事务是原子(atomic)的。我们将在 kern/log.c 中实现。
在这一层中,我们提供了以下方法:
initlog:初始化loglog_write:作为bwrite的代理,在log中记录需要被写入磁盘的 block 的标号,并标记为 dirty,之后统一写入begin_op:开始文件系统调用end_op:结束文件系统调用
1.3.1 initlog
函数 initlog 的主要工作是根据 super block 中的信息对 log 进行初始化,然后调用函数 recover_from_log,根据 log header 恢复崩溃前未写入到磁盘的数据。
// kern/log.c
void
initlog(int dev)
{
if (sizeof(struct logheader) >= BSIZE)
panic("\tinitlog: logheader is too big.\n");
struct superblock sb;
initlock(&log.lock, "log");
readsb(dev, &sb);
log.start = sb.logstart;
log.size = sb.nlog;
log.dev = dev;
recover_from_log();
cprintf("initlog: success.\n");
}其中,super block 保存了磁盘的布局信息,详见注释:
// inc/fs.h
/*
* Disk layout:
* [boot block | super block | log | inode blocks | free bit map | data blocks]
*
* mkfs computes the super block and builds an initial file system.
* The super block describes the disk layout:
*/
struct superblock {
uint32_t size; // Size of file system image (blocks)
uint32_t nblocks; // Number of data blocks
uint32_t ninodes; // Number of inodes
uint32_t nlog; // Number of log blocks
uint32_t logstart; // Block number of first log block
uint32_t inodestart; // Block number of first inode block
uint32_t bmapstart; // Block number of first free map block
};我们先调用函数 readsb 读取 super block。
// kern/fs.c
/*
* Read the super block.
*/
void
readsb(int dev, struct superblock* sb)
{
struct buf* b = bread(dev, 1);
memmove(sb, b->data, sizeof(*sb));
brelse(b);
}然后我们利用 super block 中的信息初始化 log,其中 log 的结构如下所示:
// kern/log.c
/*
* Contents of the header block, used for both the on-disk header block
* and to keep track in memory of logged block # before commit.
*/
struct logheader {
int n;
int block[LOGSIZE];
};
struct log {
struct spinlock lock;
int start;
int size;
int outstanding; // How many FS sys calls are executing.
int committing; // In commit(), please wait.
int dev;
struct logheader lh;
} log;这里 log header 保存的是已 commit 的 block 的标号。
log 初始化完毕后,我们调用函数 recover_from_log 进行磁盘的恢复工作,以维护磁盘的崩溃一致性。
函数 recover_from_log 首先调用函数 read_head 将磁盘中的 log header 读取到内存,然后调用函数 install_trans 根据 log header 将已 commit 的 block 写入到磁盘,最后清空内存中的 log header,并调用函数 write_head 清空磁盘中的 log header。
// kern/log.c
static void
recover_from_log()
{
read_head();
install_trans(); // if committed, copy from log to disk
log.lh.n = 0;
write_head(); // clear the log
}具体来说,函数 read_head 先读取磁盘中的 log header,并将其复制到内存中的 log 结构里。
// kern/log.c
/*
* Read the log header from disk into the in-memory log header.
*/
static void
read_head()
{
struct buf* buf = bread(log.dev, log.start);
struct logheader* lh = (struct logheader*)(buf->data);
log.lh.n = lh->n;
for (int i = 0; i < log.lh.n; ++i) log.lh.block[i] = lh->block[i];
brelse(buf);
}随后,函数 install_trans 根据 log header 中 block 的标号,将磁盘中已 commit 但还未写入到磁盘的 block 的内容复制到一个 buf 里,然后将它写入到磁盘。
// kern/log.c
/*
* Copy committed blocks from log to their home location.
*/
static void
install_trans()
{
for (int i = 0; i < log.lh.n; ++i) {
struct buf* log_buf = bread(log.dev, log.start + i + 1);
struct buf* dst_buf = bread(log.dev, log.lh.block[i]);
memmove(dst_buf->data, log_buf->data, BSIZE);
brelse(log_buf);
bwrite(dst_buf);
brelse(dst_buf);
}
}最后,将内存中的 log header 清空,并调用函数 write_head 将其写入到磁盘,从而将磁盘中的 log header 也清空。
// kern/log.c
/*
* Write in-memory log header to disk.
* This is the true point at which the
* current transaction commits.
*/
static void
write_head()
{
struct buf* buf = bread(log.dev, log.start);
struct logheader* lh = (struct logheader*)(buf->data);
lh->n = log.lh.n;
for (int i = 0; i < log.lh.n; ++i) lh->block[i] = log.lh.block[i];
bwrite(buf);
brelse(buf);
}1.3.2 log_write
函数 log_write 的主要工作是在内存中的 log header 里记录需要被写入磁盘的 block 的标号,并标记这个 block 对应的 buf 为 dirty,以固定在 bcache 中,不会因 LRU 算法被意外淘汰。这些 block 将在之后被统一连续写入磁盘,从而提高效率。
// kern/log.c
/*
* Caller has modified b->data and is done with the buffer.
* Record the block number and pin in the cache with B_DIRTY.
* commit() / write_log() will do the disk write.
*
* log_write() replaces bwrite(); a typical use is:
* bp = bread(...)
* modify bp->data[]
* log_write(bp)
* brelse(bp)
*/
void
log_write(struct buf* b)
{
if (log.lh.n >= LOGSIZE || log.lh.n >= log.size - 1)
panic("\tlog_write: transaction is too big.\n");
if (log.outstanding < 1) panic("\tlog_write: outside of transaction.\n");
acquire(&log.lock);
int i = 0;
for (; i < log.lh.n; ++i) {
if (log.lh.block[i] == b->blockno) break; // log absorption
}
if (i == log.lh.n) {
log.lh.block[i] = b->blockno;
++log.lh.n;
}
b->flags |= B_DIRTY; // prevent eviction
release(&log.lock);
}这里引入了 absorption 的优化机制。当在一个事务中多次写入同一个 block 时,在 log header 中仅记录一次这个 block 的标号,从而节省 log header 的空间,并提高效率。
1.3.3 begin_op
函数 begin_op 的主要工作是在事务开始前,等待 log 空闲(不处于正在 commit 的状态)且可用(log header 有足够的空间保存新的待写 block 的标号),然后才允许开始本次文件系统调用。
// kern/log.c
/*
* Called at the start of each FS system call.
*/
void
begin_op()
{
acquire(&log.lock);
while (1) {
if (log.committing) {
sleep(&log, &log.lock);
} else if (log.lh.n + (log.outstanding + 1) * MAXOPBLOCKS > LOGSIZE) {
// This op might exhaust log space; wait for commit.
sleep(&log, &log.lock);
} else {
++log.outstanding;
release(&log.lock);
break;
}
}
}1.3.4 end_op
函数 end_op 的主要工作是在事务结束后,将 log header 中标记的 block 统一连续写入磁盘,并唤醒函数 begin_op 中等待 log 空闲且可用的文件系统调用。
// kern/log.c
/*
* Called at the end of each FS system call.
* Commits if this was the last outstanding operation.
*/
void
end_op()
{
int do_commit = 0;
acquire(&log.lock);
--log.outstanding;
if (log.committing) panic("\tend_op: log is committing.\n");
if (!log.outstanding) {
do_commit = 1;
log.committing = 1;
} else {
// begin_op() may be waiting for log space, and decrementing
// log.outstanding has decreased the amount of reserved space.
wakeup(&log);
}
release(&log.lock);
if (do_commit) {
commit();
acquire(&log.lock);
log.committing = 0;
wakeup(&log);
release(&log.lock);
}
}具体来说,先判断当前事务是否已结束(即 outstanding 的系统调用数量为 0)。如果是,则调用函数 commit 进行写磁盘操作。
函数 commit 首先调用函数 write_log 将待 commit 的 block 写入到磁盘中 log 对应的位置,接着调用函数 write_head 将内存中的 log header 写入到磁盘,然后调用函数 install_trans 根据 log header 将已 commit 的 block 写入到磁盘,最后清空内存中的 log header,并调用函数 write_head 清空磁盘中的 log header。
// kern/log.c
static void
commit()
{
if (log.lh.n > 0) {
write_log();
write_head();
install_trans();
log.lh.n = 0;
write_head(); // erase the transaction from the log
}
}具体来说,函数 write_log 根据 log header 中 block 的标号,将待 commit 的 block 写入到磁盘中 log 对应的位置。
// kern/log.c
/*
* Copy modified blocks from cache to log.
*/
static void
write_log()
{
for (int i = 0; i < log.lh.n; ++i) {
struct buf* log_buf = bread(log.dev, log.start + i + 1);
struct buf* cache_buf = bread(log.dev, log.lh.block[i]);
memmove(log_buf->data, cache_buf->data, BSIZE);
brelse(cache_buf);
bwrite(log_buf);
brelse(log_buf);
}
}随后,函数 write_head 将内存中的 log header 写入到磁盘,此时事务被 commit。
// kern/log.c
/*
* Write in-memory log header to disk.
* This is the true point at which the
* current transaction commits.
*/
static void
write_head()
{
struct buf* buf = bread(log.dev, log.start);
struct logheader* lh = (struct logheader*)(buf->data);
lh->n = log.lh.n;
for (int i = 0; i < log.lh.n; ++i) lh->block[i] = log.lh.block[i];
bwrite(buf);
brelse(buf);
}之后的写磁盘过程同 1.3.1 节中函数 recover_from_log 的后半段。
1.4 Inode
第 4 层是索引节点(inode),包含了文件的元信息,用于描述文件系统对象。我们将在 kern/fs.c 中实现。
在这一层中,我们提供了以下方法:
iinit:初始化inode和icacheialloc:分配一个inodeiupdate:将内存中的inode写入到磁盘idup:将inode的引用数加1,其中引用数表示当前内存中指向这个inode的指针数量ilock:给inode加锁,需要时从磁盘中读取inodeiunlock:给inode解锁iput:当inode的引用数为1时,清空并释放该inode,否则将其引用数减1iunlockput:iunlock+iput的别名stati:复制inode的元数据到statreadi:从inode中读取数据writei:写入数据到inode
1.4.1 iinit
函数 iinit 的主要工作是初始化 icache 和 inode 的锁。
// kern/fs.c
void
iinit(int dev)
{
initlock(&icache.lock, "icache");
for (int i = 0; i < NINODE; ++i)
initsleeplock(&icache.inode[i].lock, "inode");
readsb(dev, &sb);
cprintf(
"super block: size %d nblocks %d ninodes %d nlog %d logstart %d inodestart %d bmapstart %d\n",
sb.size, sb.nblocks, sb.ninodes, sb.nlog, sb.logstart, sb.inodestart,
sb.bmapstart);
cprintf("iinit: success.\n");
}其中,icache 的结构如下所示:
// kern/fs.c
struct {
struct spinlock lock;
struct inode inode[NINODE];
} icache;inode 的结构如下所示:
// inc/file.h
/*
* In-memory copy of an inode.
*/
struct inode {
uint32_t dev; // Device number
uint32_t inum; // Inode number
int ref; // Reference count
struct sleeplock lock; // Protects everything below here
int valid; // Inode has been read from disk?
uint16_t type; // Copy of disk inode
uint16_t major;
uint16_t minor;
uint16_t nlink;
uint32_t size;
uint32_t addrs[NDIRECT + 1];
};1.4.2 ialloc
函数 ialloc 的主要工作是在磁盘中找到一个未分配的 inode(type 为 0),然后将它的 type 设置为给定的文件类型,表示已分配,最后调用函数 iget,返回这个 inode 在内存中的拷贝。
// kern/fs.c
/*
* Allocate an inode on device dev.
*
* Mark it as allocated by giving it type type.
* Returns an unlocked but allocated and referenced inode.
*/
struct inode*
ialloc(uint32_t dev, uint16_t type)
{
for (int inum = 1; inum < sb.ninodes; ++inum) {
struct buf* bp = bread(dev, IBLOCK(inum, sb));
struct dinode* dip = (struct dinode*)bp->data + inum % IPB;
if (!dip->type) { // a free inode
memset(dip, 0, sizeof(*dip));
dip->type = type;
log_write(bp); // mark it allocated on the disk
brelse(bp);
return iget(dev, inum);
}
brelse(bp);
}
panic("\tialloc: no inodes.\n");
return 0;
}其中,函数 iget 先在 icache 中根据标号(inum)寻找对应的 inode。如果找到,则将其引用数(ref)加 1 并返回,否则在 icache 中回收一个空闲的 cache entry 给这个 inode,将其引用数(ref)设置为 1 并返回。
// kern/fs.c
/*
* Find the inode with number inum on device dev
* and return the in-memory copy. Does not lock
* the inode and does not read it from disk.
*/
static struct inode*
iget(uint32_t dev, uint32_t inum)
{
acquire(&icache.lock);
// Is the inode already cached?
struct inode* empty = NULL;
for (int i = 0; i < NINODE; ++i) {
struct inode* ip = &icache.inode[i];
if (ip->ref > 0 && ip->dev == dev && ip->inum == inum) {
ip->ref++;
release(&icache.lock);
return ip;
}
if (!empty && !ip->ref) empty = ip; // remember empty slot
}
// Recycle an inode cache entry.
if (!empty) panic("\tiget: no inodes.\n");
struct inode* ip = empty;
ip->dev = dev;
ip->inum = inum;
ip->ref = 1;
ip->valid = 0;
release(&icache.lock);
return ip;
}1.4.3 iupdate
函数 iupdate 的主要工作是将内存中的 inode 写入到磁盘。由于我们的 icache 采用直写(write-through)模式,因此每当 inode 有字段被修改,就需要调用一次函数 iupdate 进行写回操作。
// kern/fs.c
/*
* Copy a modified in-memory inode to disk.
*
* Must be called after every change to an ip->xxx field
* that lives on disk, since i-node cache is write-through.
* Caller must hold ip->lock.
*/
void
iupdate(struct inode* ip)
{
struct buf* bp = bread(ip->dev, IBLOCK(ip->inum, sb));
struct dinode* dip = (struct dinode*)bp->data + ip->inum % IPB;
dip->type = ip->type;
dip->major = ip->major;
dip->minor = ip->minor;
dip->nlink = ip->nlink;
dip->size = ip->size;
memmove(dip->addrs, ip->addrs, sizeof(ip->addrs));
log_write(bp);
brelse(bp);
}1.4.4 idup
函数 idup 的主要工作是将 inode 的引用数加 1,其中引用数表示当前内存中指向这个 inode 的指针数量。
// kern/fs.c
/*
* Increment reference count for ip.
* Returns ip to enable ip = idup(ip1) idiom.
*/
struct inode*
idup(struct inode* ip)
{
acquire(&icache.lock);
ip->ref++;
release(&icache.lock);
return ip;
}1.4.5 ilock
函数 ilock 的主要工作是给指定的 inode 加锁。如果当前 inode 不在内存中(即 valid 为 0),则从磁盘中读取,并将 valid 设置为 1。
// kern/fs.c
/*
* Lock the given inode.
* Reads the inode from disk if necessary.
*/
void
ilock(struct inode* ip)
{
if (!ip || ip->ref < 1) panic("\tilock: invalid inode.\n");
acquiresleep(&ip->lock);
if (!ip->valid) {
struct buf* bp = bread(ip->dev, IBLOCK(ip->inum, sb));
struct dinode* dip = (struct dinode*)bp->data + ip->inum % IPB;
ip->type = dip->type;
if (!ip->type) {
brelse(bp);
panic("\tilock: no type.\n");
}
ip->major = dip->major;
ip->minor = dip->minor;
ip->nlink = dip->nlink;
ip->size = dip->size;
memmove(ip->addrs, dip->addrs, sizeof(ip->addrs));
ip->valid = 1;
brelse(bp);
}
}1.4.6 iunlock
函数 iunlock 的主要工作是给指定的 inode 解锁。
// kern/fs.c
/*
* Unlock the given inode.
*/
void
iunlock(struct inode* ip)
{
if (!ip || !holdingsleep(&ip->lock) || ip->ref < 1)
panic("\tiunlock: invalid inode.\n");
releasesleep(&ip->lock);
}1.4.7 iput
函数 iput 的主要工作是当 inode 的引用数为 1 时,调用函数 itrunc 清空并释放该 inode 的内容,然后调用函数 iupdate 更新磁盘中的 inode。否则将其引用数减 1。
// kern/fs.c
/*
* Drop a reference to an in-memory inode.
*
* If that was the last reference, the inode cache entry can
* be recycled.
* If that was the last reference and the inode has no links
* to it, free the inode (and its content) on disk.
* All calls to iput() must be inside a transaction in
* case it has to free the inode.
*/
void
iput(struct inode* ip)
{
acquire(&icache.lock);
if (ip->ref == 1 && ip->valid && !ip->nlink) {
// ip->ref == 1 means no other process can have ip locked,
// so this acquiresleep() won't block (or deadlock).
acquiresleep(&ip->lock);
release(&icache.lock);
// inode has no links and no other references: truncate and free.
itrunc(ip);
ip->type = 0;
iupdate(ip);
ip->valid = 0;
releasesleep(&ip->lock);
acquire(&icache.lock);
}
ip->ref--;
release(&icache.lock);
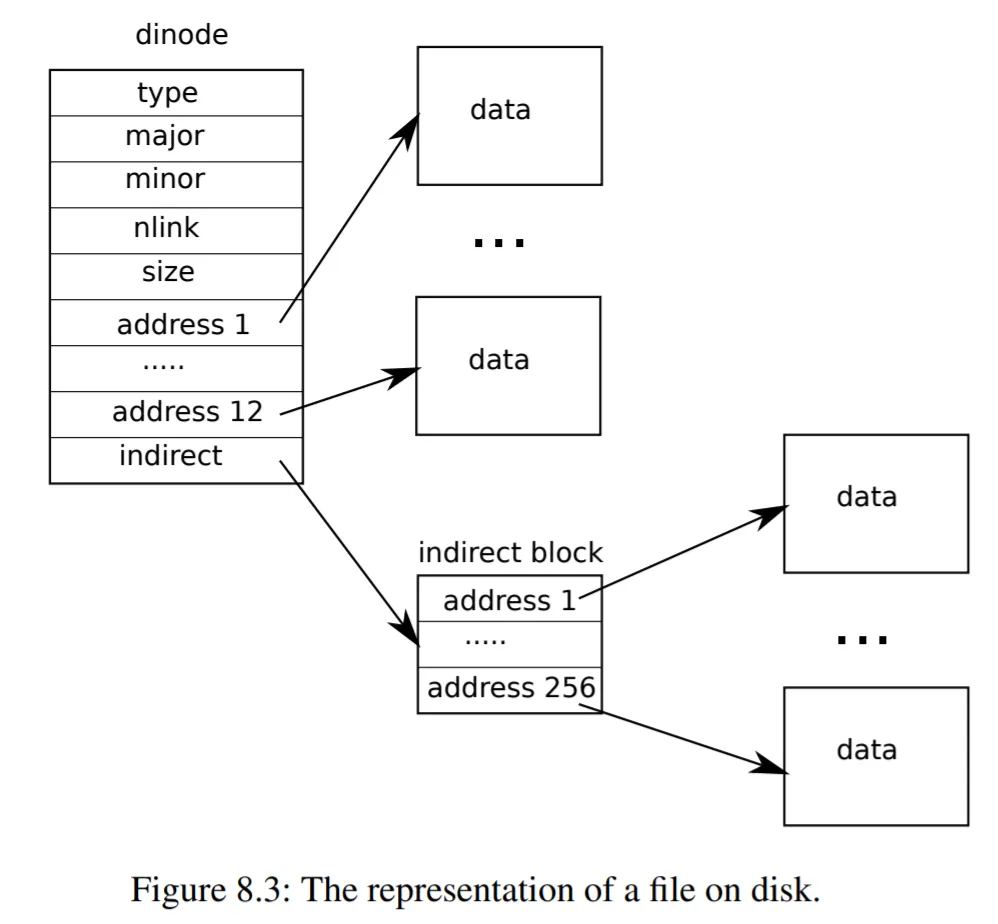
}这里函数 itrunc 用于清空 inode 的内容,包括 NDIRECT 个直接索引磁盘块(direct block)和 NINDIRECT 个间接索引磁盘块(indirect block)。
// kern/fs.c
/*
* Truncate inode (discard contents).
*
* Only called when the inode has no links
* to it (no directory entries referring to it)
* and has no in-memory reference to it (is
* not an open file or current directory).
*/
static void
itrunc(struct inode* ip)
{
for (int i = 0; i < NDIRECT; ++i) {
if (ip->addrs[i]) {
bfree(ip->dev, ip->addrs[i]);
ip->addrs[i] = 0;
}
}
if (ip->addrs[NDIRECT]) {
struct buf* bp = bread(ip->dev, ip->addrs[NDIRECT]);
uint32_t* a = (uint32_t*)bp->data;
for (int j = 0; j < NINDIRECT; ++j) {
if (a[j]) bfree(ip->dev, a[j]);
}
brelse(bp);
bfree(ip->dev, ip->addrs[NDIRECT]);
ip->addrs[NDIRECT] = 0;
}
ip->size = 0;
iupdate(ip);
}其中,函数 bfree 用于释放一个 block,将其在 bitmap 中标记为未使用。
// kern/fs.c
/*
* Free a disk block.
*/
static void
bfree(int dev, uint32_t b)
{
struct buf* bp = bread(dev, BBLOCK(b, sb));
int bi = b % BPB;
int m = 1 << (bi % 8);
if (!(bp->data[bi / 8] & m)) panic("\tbfree: freeing a free block.\n");
bp->data[bi / 8] &= ~m;
log_write(bp);
brelse(bp);
}1.4.8 iunlockput
函数 iunlockput 是 iunlock + iput 的别名。
// kern/fs.c
/*
* Common idiom: unlock, then put.
*/
void
iunlockput(struct inode* ip)
{
iunlock(ip);
iput(ip);
}1.4.9 stati
函数 stati 的主要工作是复制 inode 的元数据(metadata)到 stat 结构,届时用户程序可以通过 stat 系统调用读取。
// kern/fs.c
/*
* Copy stat information from inode.
* Caller must hold ip->lock.
*/
void
stati(struct inode* ip, struct stat* st)
{
// FIXME: Support other fields in stat.
st->st_dev = ip->dev;
st->st_ino = ip->inum;
st->st_nlink = ip->nlink;
st->st_size = ip->size;
switch (ip->type) {
case T_FILE: st->st_mode = S_IFREG; break;
case T_DIR: st->st_mode = S_IFDIR; break;
case T_DEV: st->st_mode = 0; break;
default: panic("\tstati: unexpected stat type %d.\n", ip->type);
}
}1.4.10 readi
函数 readi 的主要工作是从 inode 中读取数据。具体来说,先确保数据的读取范围在文件内,然后利用函数 bmap 定位文件中 block 的地址并读取到 buf,接着将数据从 buf 复制到目标地址 dst,最后返回成功读取的 block 数量。
// kern/fs.c
/*
* Read data from inode.
* Caller must hold ip->lock.
*/
ssize_t
readi(struct inode* ip, char* dst, size_t off, size_t n)
{
if (ip->type == T_DEV) {
if (ip->major < 0 || ip->major >= NDEV || !devsw[ip->major].read)
return -1;
return devsw[ip->major].read(ip, dst, n);
}
if (off > ip->size || off + n < off) return -1;
if (off + n > ip->size) n = ip->size - off;
for (size_t tot = 0, m = 0; tot < n; tot += m, off += m, dst += m) {
struct buf* bp = bread(ip->dev, bmap(ip, off / BSIZE));
m = min(n - tot, BSIZE - off % BSIZE);
memmove(dst, bp->data + off % BSIZE, m);
brelse(bp);
}
return n;
}这里函数 bmap 根据 block 的标号找到其对应的地址并返回,其中 direct block 的地址位于数组 ip->addrs 中,indirect block 的地址位于 ip->addrs[NDIRECT] 指向的 block 所保存的数组中。如果发现找不到对应的 block,则调用函数 balloc 分配一个新的 block。
// kern/fs.c
/*
* Inode content
*
* The content (data) associated with each inode is stored
* in blocks on the disk. The first NDIRECT block numbers
* are listed in ip->addrs[]. The next NINDIRECT blocks are
* listed in block ip->addrs[NDIRECT].
*
* Return the disk block address of the nth block in inode ip.
* If there is no such block, bmap allocates one.
*/
static uint32_t
bmap(struct inode* ip, uint32_t bn)
{
if (bn < NDIRECT) {
// Load direct block, allocating if necessary.
uint32_t addr = ip->addrs[bn];
if (!addr) ip->addrs[bn] = addr = balloc(ip->dev);
return addr;
}
bn -= NDIRECT;
if (bn < NINDIRECT) {
// Load indirect block, allocating if necessary.
uint32_t addr = ip->addrs[NDIRECT];
if (!addr) ip->addrs[NDIRECT] = addr = balloc(ip->dev);
struct buf* bp = bread(ip->dev, addr);
uint32_t* a = (uint32_t*)bp->data;
addr = a[bn];
if (!addr) {
a[bn] = addr = balloc(ip->dev);
log_write(bp);
}
brelse(bp);
return addr;
}
panic("\tbmap: out of range.\n");
return 0;
}其中,函数 balloc 根据 block 在 bitmap 中所对应的位,遍历所有 block 找到一个可用的 block,将其在 bitmap 中标记为使用中,并调用函数 bzero 清空此 block。
// kern/fs.c
/*
* Allocate a zeroed disk block.
*/
static uint32_t
balloc(uint32_t dev)
{
for (int b = 0; b < sb.size; b += BPB) {
struct buf* bp = bread(dev, BBLOCK(b, sb));
for (int bi = 0; bi < BPB && b + bi < sb.size; ++bi) {
int m = 1 << (bi % 8);
if (!(bp->data[bi / 8] & m)) { // Is block free?
bp->data[bi / 8] |= m; // Mark block in use.
log_write(bp);
brelse(bp);
bzero(dev, b + bi);
return b + bi;
}
}
brelse(bp);
}
panic("\tballoc: out of blocks.\n");
return 0;
}函数 bzero 用于清空一个 block。
// kern/fs.c
/*
* Zero a block.
*/
static void
bzero(int dev, int bno)
{
struct buf* b = bread(dev, bno);
memset(b->data, 0, BSIZE);
log_write(b);
brelse(b);
}1.4.11 writei
函数 writei 的主要工作是写入数据到 inode。具体来说,先确保数据的写入起始地址在文件内,且写入结束地址不超过最大文件大小 MAXFILE * BSIZE,然后利用函数 bmap 定位文件中 block 的地址并读取到 buf,接着将数据从源地址 src 复制到 buf,并调用函数 log_write 加入写磁盘队列,最后返回成功写入的 block 数量。其中,如果写入的 block 数量超过文件大小,文件将自动扩容,最后需要更新此文件的大小,并调用函数 iupdate 写入到磁盘。
// kern/fs.c
/*
* Write data to inode.
* Caller must hold ip->lock.
*/
ssize_t
writei(struct inode* ip, char* src, size_t off, size_t n)
{
if (ip->type == T_DEV) {
if (ip->major < 0 || ip->major >= NDEV || !devsw[ip->major].write)
return -1;
return devsw[ip->major].write(ip, src, n);
}
if (off > ip->size || off + n < off) return -1;
if (off + n > MAXFILE * BSIZE) return -1;
for (size_t tot = 0, m = 0; tot < n; tot += m, off += m, src += m) {
struct buf* bp = bread(ip->dev, bmap(ip, off / BSIZE));
m = min(n - tot, BSIZE - off % BSIZE);
memmove(bp->data + off % BSIZE, src, m);
log_write(bp);
brelse(bp);
}
if (n > 0 && off > ip->size) {
ip->size = off;
iupdate(ip);
}
return n;
}1.5 Directory
第 5 层是目录,用于组织文件系统的层次结构(hierarchy)。TA 已在 kern/fs.c 中实现,由于时间有限,这里就不详细阐述了。
在这一层中,我们提供了以下方法:
namecmp:按字典序比较两个目录名的大小dirlookup:在一个目录下查找指定名称的文件夹dirlink:在一个目录下新建指定名称的文件夹
1.6 Pathname
第 6 层是路径,用于以字符串表示一个文件或文件夹在文件系统中的位置。TA 已在 kern/fs.c 中实现,由于时间有限,这里就不详细阐述了。
在这一层中,我们提供了以下方法:
namei:查找指定路径的文件或文件夹nameiparent:查找指定路径的父文件夹
1.7 File descriptor
第 7 层是文件描述符,以非负整数的形式,表示一个已打开文件(或管道、socket 等,一切皆文件!)的引用。内核为每个进程维护了一个进程级文件表(file table),同时在全局维护了一个系统级文件表(global file table,或 ftable),包含了所有打开的文件,文件描述符实际就是这个表的索引。我们将在 kern/file.c 中实现。由于时间有限,我们目前仅支持普通文件。
在这一层中,我们提供了以下方法:
file_init:初始化ftablefile_alloc:分配一个新文件file_dup:将文件的引用数加1file_close:将文件的引用数减1,当引用数降到0时关闭文件file_stat:读取文件的元数据file_read:从文件读取数据file_write:写入数据到文件
1.7.1 file_init
函数 file_init 的主要工作是初始化 ftable 的锁。
// kern/file.c
void
file_init()
{
initlock(&ftable.lock, "ftable");
}其中,ftable 的结构如下所示:
// kern/file.c
struct {
struct spinlock lock;
struct file file[NFILE];
} ftable;file 的结构如下所示:
// inc/file.h
struct file {
enum { FD_NONE, FD_PIPE, FD_INODE } type;
int ref;
char readable;
char writable;
struct pipe* pipe;
struct inode* ip;
size_t off;
};1.7.2 file_alloc
函数 file_alloc 的主要工作是在 ftable 中找到一个未使用的文件(ref 为 0),然后将它标记为使用中并返回。
// kern/file.c
/*
* Allocate a file structure.
*/
struct file*
file_alloc()
{
acquire(&ftable.lock);
for (struct file* f = ftable.file; f < ftable.file + NFILE; ++f) {
if (!f->ref) {
f->ref = 1;
release(&ftable.lock);
return f;
}
}
release(&ftable.lock);
return NULL;
}1.7.3 file_dup
函数 file_dup 的主要工作是将文件的引用数加 1,表示创建一个此文件的引用拷贝。
// kern/file.c
/*
* Increment ref count for file f.
*/
struct file*
file_dup(struct file* f)
{
acquire(&ftable.lock);
if (f->ref < 1) panic("\tfile_dup: invalid file.\n");
f->ref++;
release(&ftable.lock);
return f;
}1.7.4 file_close
函数 file_close 的主要工作是将文件的引用数减 1,当引用数降到 0 时,对于普通文件,调用函数 iput 关闭文件。
// kern/file.c
/*
* Close file f. (Decrement ref count, close when reaches 0.)
*/
void
file_close(struct file* f)
{
acquire(&ftable.lock);
if (f->ref < 1) panic("\tfile_close: invalid file.\n");
if (--f->ref > 0) {
release(&ftable.lock);
return;
}
struct file ff = *f;
f->ref = 0;
f->type = FD_NONE;
release(&ftable.lock);
if (ff.type == FD_INODE) {
begin_op();
iput(ff.ip);
end_op();
} else {
panic("\tfile_close: unsupported type.\n");
}
}1.7.5 file_stat
函数 file_stat 的主要工作是调用函数 stati 读取文件的元数据。
// kern/file.c
/*
* Get metadata about file f.
*/
int
file_stat(struct file* f, struct stat* st)
{
if (f->type == FD_INODE) {
ilock(f->ip);
stati(f->ip, st);
iunlock(f->ip);
return 0;
}
return -1;
}1.7.6 file_read
函数 file_read 的主要工作是对于普通文件,调用函数 readi 从文件中读取数据。
// kern/file.c
/*
* Read from file f.
*/
ssize_t
file_read(struct file* f, char* addr, ssize_t n)
{
if (!f->readable) return -1;
if (f->type == FD_INODE) {
ilock(f->ip);
int r = readi(f->ip, addr, f->off, n);
if (r > 0) f->off += r;
iunlock(f->ip);
return r;
}
panic("\tfile_read: unsupported type.\n");
return 0;
}1.7.7 file_write
函数 file_write 的主要工作是对于普通文件,调用函数 writei 写入数据到文件。
// kern/file.c
/*
* Write to file f.
*/
ssize_t
file_write(struct file* f, char* addr, ssize_t n)
{
if (!f->writable) return -1;
if (f->type == FD_INODE) {
// Write a few blocks at a time to avoid exceeding the maximum log
// transaction size, including i-node, indirect block, allocation
// blocks, and 2 blocks of slop for non-aligned writes. This really
// belongs lower down, since writei() might be writing a device like the
// console.
int max = ((MAXOPBLOCKS - 4) / 2) * 512;
int i = 0;
while (i < n) {
int n1 = n - i;
if (n1 > max) n1 = max;
begin_op();
ilock(f->ip);
int r = writei(f->ip, addr + i, f->off, n1);
if (r > 0) f->off += r;
iunlock(f->ip);
end_op();
if (r < 0) break;
if (r != n1) panic("\tfile_write: partial data written.\n");
i += r;
}
return i == n ? n : -1;
}
panic("\tfile_write: unsupported type.\n");
return 0;
}2 系统调用
syscall.c 以及 trapasm.S 来接上 musl,或者修改 Makefile 并搬运 xv6 的简易 libc,从而允许用户态程序通过调用系统调用来操作文件系统。接上 musl 后,我们对系统调用的细节进行了一些修改。以下我们将以初始化程序 user/initcode.S 为例,简单梳理一下用户程序进行系统调用的全过程。
2.1 initcode.S
这里我们引入了 musl 的 syscall.h,其中包含了 libc 中所有系统调用所对应的 system call number 的定义,例如系统调用 sys_exec 对应的 system call number 就是 SYS_execve(其值为 221)。
对于 AArch64 架构来说,发起系统调用时,用户程序先将参数地址保存到通用寄存器 X0 ~ X5 里,再将系统调用对应的 system call number 保存到寄存器 X8 里,最后通过 svc 指令陷入内核态。1
/* user/initcode.S */
/* exec(init, argv) */
start:
ldr x0, =init
ldr x1, =argv
mov x8, #SYS_execve
svc 0x00
/* char init[] = "/init\0"; */
init:
.string "/init\0"
/* char *argv[] = { init, 0 }; */
.p2align 4
argv:
.word init
.word 0
.word 0
.word 0
2.2 trapasm.S
陷入内核态前,需要先构建 trap frame 结构。这里我们在原有寄存器的基础上,新增了 musl 需要用到的两个寄存器 Q0 和 TPIDR_EL0。
/* kern/trapasm.S */
/* Save Q0 and TPIDR_EL0 to placate musl. */
str q0, [sp, #-16]!
mrs x4, tpidr_el0
stp xzr, x4, [sp, #-16]!其中,零寄存器 xzr 用于填充空位,以保持 16 bytes 对齐。
新的 trap frame 结构如下所示:
// inc/trap.h
struct trapframe {
// Additional registers used to support musl
uint64_t _padding; // for 16-byte aligned
uint64_t tpidr_el0;
__uint128_t q0;
// Special Registers
uint64_t sp_el0; // Stack Pointer
uint64_t spsr_el1; // Program Status Register
uint64_t elr_el1; // Exception Link Register
// General-Purpose Registers
uint64_t x0;
uint64_t x1;
uint64_t x2;
uint64_t x3;
uint64_t x4;
uint64_t x5;
uint64_t x6;
uint64_t x7;
uint64_t x8;
uint64_t x9;
uint64_t x10;
uint64_t x11;
uint64_t x12;
uint64_t x13;
uint64_t x14;
uint64_t x15;
uint64_t x16;
uint64_t x17;
uint64_t x18;
uint64_t x19;
uint64_t x20;
uint64_t x21;
uint64_t x22;
uint64_t x23;
uint64_t x24;
uint64_t x25;
uint64_t x26;
uint64_t x27;
uint64_t x28;
uint64_t x29; // Frame Pointer
uint64_t x30; // Procedure Link Register
};2.3 trap.c
随后跳转到函数 trap 入口。在函数 trap 中,我们根据寄存器 ESR (Exception Syndrome Register) 判断当前为系统调用,随后调用函数 syscall1,传入 trap frame,并将返回值保存在 trap frame 的寄存器 X0 中。
// kern/trap.c
void
trap(struct trapframe* tf)
{
int ec = resr() >> EC_SHIFT, iss = resr() & ISS_MASK;
lesr(0); // Clear esr.
switch (ec) {
case EC_UNKNOWN: interrupt(tf); break;
case EC_SVC64:
if (!iss) {
/* Jump to syscall to handle the system call from user process */
tf->x0 = syscall1(tf);
} else {
cprintf("trap: unexpected svc iss 0x%x\n", iss);
}
break;
default: panic("\ttrap: unexpected irq.\n");
}
}2.4 syscall.c
我们根据之前保存在寄存器 X8 的值,可以得到当前的 system call number。随后利用函数指针表 syscalls,即可进行相应的系统调用。
// kern/syscall.c
int
syscall1(struct trapframe* tf)
{
struct proc* p = thisproc();
p->tf = tf;
uint64_t sysno = tf->x8;
if (sysno >= 0 && sysno < ARRAY_SIZE(syscalls) && syscalls[sysno]) {
cprintf("syscall: syscall %d from proc %d\n", sysno, p->pid);
tf->x0 = syscalls[sysno]();
return tf->x0;
} else {
cprintf("syscall: unknown syscall %d from proc %d\n", sysno, p->pid);
while (1) {}
return -1;
}
return 0;
}函数指针表 syscalls 包含了我们目前已实现的所有系统调用:
// inc/types.h
typedef int (*func)();// kern/syscall.c
static func syscalls[] = {
[SYS_set_tid_address] = sys_gettid,
[SYS_gettid] = sys_gettid,
[SYS_ioctl] = sys_ioctl,
[SYS_rt_sigprocmask] = sys_rt_sigprocmask,
[SYS_brk] = (func)sys_brk,
[SYS_execve] = sys_exec,
[SYS_sched_yield] = sys_yield,
[SYS_clone] = sys_clone,
[SYS_wait4] = sys_wait4,
// FIXME: exit_group should kill every thread in the current thread group.
[SYS_exit_group] = sys_exit,
[SYS_exit] = sys_exit,
[SYS_dup] = sys_dup,
[SYS_chdir] = sys_chdir,
[SYS_fstat] = sys_fstat,
[SYS_newfstatat] = sys_fstatat,
[SYS_mkdirat] = sys_mkdirat,
[SYS_mknodat] = sys_mknodat,
[SYS_openat] = sys_openat,
[SYS_writev] = (func)sys_writev,
[SYS_read] = (func)sys_read,
[SYS_close] = sys_close,
};由于时间有限,这些系统调用的功能和具体实现这里就不细讲了。函数定义的位置可以参见 syscall1.h 里的注释。
// inc/syscall1.h
// kern/syscall1.c
int sys_gettid();
int sys_ioctl();
int sys_rt_sigprocmask();
// kern/sysproc.c
int sys_exec();
int sys_yield();
size_t sys_brk();
int sys_clone();
int sys_wait4();
int sys_exit();
// kern/sysfile.c
int sys_dup();
ssize_t sys_read();
ssize_t sys_write();
ssize_t sys_writev();
int sys_close();
int sys_fstat();
int sys_fstatat();
int sys_openat();
int sys_mkdirat();
int sys_mknodat();
int sys_chdir();至此,用户程序就完成了一次系统调用。
3 Shell
user/src/sh 目录下,但需要实现 brk 系统调用来使用 malloc,你也可以自行实现一个简单的 shell。请在 user/src/cat 中实现 cat 命令并在你的 shell 中执行。3.1 cat
我们引入了 3 个头文件,分别用于:
fcntl.h:打开和关闭文件,对应函数open和closestdio.h:输出文本到终端,对应函数printfunistd.h:各种系统调用,包括函数read,write,_exit
cat 命令的实质就是从一个文件读取数据,然后写入到另一个文件(默认为终端)。至于文件类型是管道、终端还是普通文件,我们并不关心,因为系统调用的底层已经针对不同的文件类型进行了相应的处理2。cat 命令的完整实现如下3:
// user/src/cat/main.c
#include <fcntl.h>
#include <stdio.h>
#include <unistd.h>
char buf[512];
void
cat(int fd)
{
int n = read(fd, buf, sizeof(buf));
while (n > 0) {
if (write(1, buf, n) != n) {
printf("cat: write error.\n");
return;
}
}
if (n < 0) {
printf("cat: read error.\n");
return;
}
}
int
main(int argc, char* argv[])
{
if (argc <= 1) _exit(-1);
for (int i = 1; i < argc; ++i) {
int fd = open(argv[i], 0);
if (fd < 0) {
printf("cat: cannot open %s.\n", argv[i]);
_exit(-1);
}
cat(fd);
close(fd);
}
_exit(0);
}运行结果
遗憾的是,由于时间有限,代码虽然已全部完成(包括所有系统调用,以及函数 fork, wait, execve 等),但尚未调通。目前系统可以成功进行到初始化程序 initcode.S 完成系统调用,但暂时还不能启动 shell,故障原因仍在排查中。
有机会再继续做吧。
make && make qemuconsole_init: success.
main: [CPU 3] init started.
alloc_init: success.
proc_init: success.
irq_init: success.
timer_init: success at CPU 3.
file_init: success.
binit: success.
- mbox write: 0x7ccc8
- mbox read: 0x7ccc8
- clock rate: 50000000
- SD base clock rate from mailbox: 50000000
- Reset the card.
- Divisor selected = 104, shift count = 6
- EMMC: Set clock, status 0x1ff0000 CONTROL1: 0xe6807
- Send IX_GO_IDLE_STATE command.
- Send command response: 0
- EMMC: Sending ACMD41 SEND_OP_COND status 1ff0000
- Divisor selected = 2, shift count = 0
- EMMC: Set clock, status 0x1ff0000 CONTROL1: 0xe0207
- EMMC: SD Card Type 2 SC 128Mb UHS-I 0 mfr 170 'XY:QEMU!' r0.1 2/2006, #deadbeef RCA 4567
sd_init: Partition 1: 00 20 21 00 0c 49 01 08 00 08 00 00 00 00 02 00
- Status: 0
- CHS address of first absolute sector: head=32, sector=33, cylinder=0
- Partition type: 12
- CHS address of last absolute sector: head=73, sector=1, cylinder=8
- LBA of first absolute sector: 0x800
- Number of sectors: 131072
sd_init: Partition 2: 00 49 02 08 83 51 01 10 00 08 02 00 00 f8 01 00
- Status: 0
- CHS address of first absolute sector: head=73, sector=2, cylinder=8
- Partition type: 131
- CHS address of last absolute sector: head=81, sector=1, cylinder=16
- LBA of first absolute sector: 0x20800
- Number of sectors: 129024
sd_init: Partition 3: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
- Status: 0
- CHS address of first absolute sector: head=0, sector=0, cylinder=0
- Partition type: 0
- CHS address of last absolute sector: head=0, sector=0, cylinder=0
- LBA of first absolute sector: 0x0
- Number of sectors: 0
sd_init: Partition 4: 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
- Status: 0
- CHS address of first absolute sector: head=0, sector=0, cylinder=0
- Partition type: 0
- CHS address of last absolute sector: head=0, sector=0, cylinder=0
- LBA of first absolute sector: 0x0
- Number of sectors: 0
sd_init: Boot signature: 55 aa
sd_init: success.
proc_alloc: proc 1 success.
user_init: proc 1 (initproc) success.
main: [CPU 3] init success.
main: [CPU 0] init started.
timer_init: success at CPU 0.
main: [CPU 2] init started.
timer_init: success at CPU 2.
main: [CPU 1] init started.
main: [CPU 0] init success.
main: [CPU 2] init success.
timer_init: success at CPU 1.
bget: dev 1 blockno 133121
main: [CPU 1] init success.
super block: size 1000 nblocks 941 ninodes 200 nlog 30 logstart 2 inodestart 32 bmapstart 58
iinit: success.
bget: dev 1 blockno 133121
bget: dev 1 blockno 133122
bget: dev 1 blockno 133122
initlog: success.
syscall: syscall 221 from proc 1
sys_exec: exec '' uargv 0
sys_exec: failed to fetch argument.测试环境
- Ubuntu 18.04.5 LTS (WSL2 5.4.72)
- QEMU emulator 5.0.50
- GCC 8.4.0 (Target: aarch64-linux-gnu)
- GDB 8.2 (Target: aarch64-linux-gnu)
- GNU Make 4.1